基本情報
出展製品・サービス
自律走行型大型草刈機
自律走行型大型草刈機
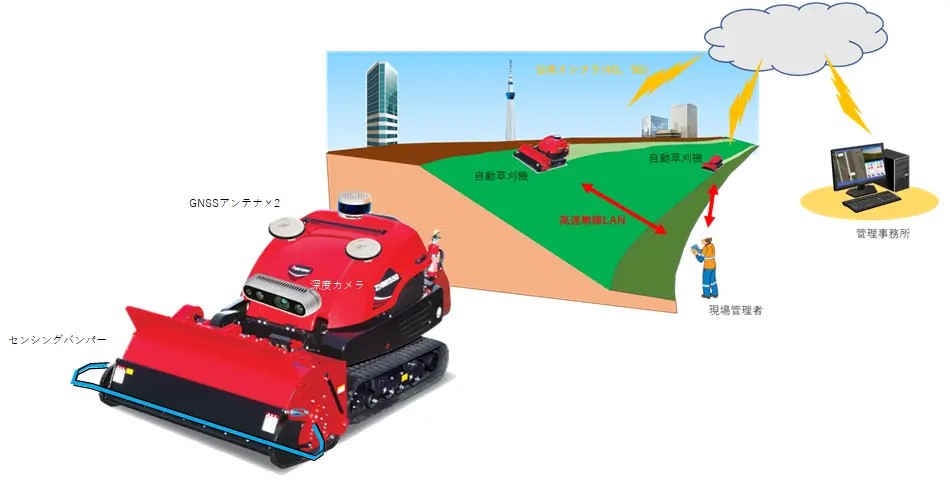
本技術は、河川堤防の草刈り作業に適用可能な“大型自律走行型草刈り機”で、作業の高度化ならびに効率化を図り、さらに自律走行による省力化を実現することを目的として、令和2年度から国土交通省が推進する”建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト:PRISM”に採用された技術です。あらかじめ設定した経路上を自律走行し除草作業を行い、人や車両などの障害物はAIを活用した画像認識技術により検知し、自動回避や自動停止を行います。作業状況は高速データ通信(高速無線LAN、4G/5G回線)を通じて転送され、管理者はリモートで作業状況を管理することができます。
本技術は、河川堤防の草刈り作業に適用可能な“大型自律走行型草刈り機”で、作業の高度化ならびに効率化を図り、さらに自律走行による省力化を実現することを目的として、令和2年度から国土交通省が推進する”建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト:PRISM”に採用された技術です。あらかじめ設定した経路上を自律走行し除草作業を行い、人や車両などの障害物はAIを活用した画像認識技術により検知し、自動回避や自動停止を行います。作業状況は高速データ通信(高速無線LAN、4G/5G回線)を通じて転送され、管理者はリモートで作業状況を管理することができます。
X120GO
X120GO
本システムには360°回転するレーザーが上部にあり、360°x270°の範囲で点群を取得し、生成する事ができます。プロフェッショナルレベルのSLAMアルゴリズムを融合し、光やGNSSがなくても周囲環境の高精度三次元点群データを取得できます。
水平200°FOVと垂直100°FOVを可能にするために搭載された3台の5MPカメラは、テクスチャ情報を同期しながら取得し、カラー点群とパノラマ画像を生成します。
X120GOはGOappを使用してプロジェクトの確認と管理ができます。さらに計測状況の更新と表示を同時に行い、GOappを介してリアルタイムSLAMマッピングとプレビューも可能にします。GOpostでは取得データの後処理を実行し、高精度で高精細なカラー点群の生成、パノラマ画像の生成、点群表示、最適化処理ができます。
X120GOはデータ保存と操作が一体化された設計であり、交換可能なリチウムイオンバッテリーを搭載しています。
スタートボタンを押すだけで、X120GOはすぐに操作を開始できるため、データ取得がより効率的かつ便利です。
本システムには360°回転するレーザーが上部にあり、360°x270°の範囲で点群を取得し、生成する事ができます。プロフェッショナルレベルのSLAMアルゴリズムを融合し、光やGNSSがなくても周囲環境の高精度三次元点群データを取得できます。
水平200°FOVと垂直100°FOVを可能にするために搭載された3台の5MPカメラは、テクスチャ情報を同期しながら取得し、カラー点群とパノラマ画像を生成します。
X120GOはGOappを使用してプロジェクトの確認と管理ができます。さらに計測状況の更新と表示を同時に行い、GOappを介してリアルタイムSLAMマッピングとプレビューも可能にします。GOpostでは取得データの後処理を実行し、高精度で高精細なカラー点群の生成、パノラマ画像の生成、点群表示、最適化処理ができます。
X120GOはデータ保存と操作が一体化された設計であり、交換可能なリチウムイオンバッテリーを搭載しています。
スタートボタンを押すだけで、X120GOはすぐに操作を開始できるため、データ取得がより効率的かつ便利です。

XVS 3D Scanner
XVS 3D Scanner
本システムは、高解像度画像、慣性システムおよび複合したアルゴリズムに基づいた技術が用いられています。XVSでシナリオを記録すると、写真測量技術によって3Dモデルが生成されます。歩きながら動きのあるシーンを記録すると、リアルタイムインターフェイスがデータ記録方法をガイドし、推奨の移動速度を提示します。そして必要に応じて計測エリアへ戻って十分に画像がオーバーラップするようにします。
Visual SLAM (Simultaneous localization and mapping) システムのおかげで、リアルタイムにタブレット上に軌跡が表示されます。慣性計測装置(IMU)センサーは、アルゴリズムが連続した画像ブロックを生成するのに役立ちます。
オフィスに戻り3Dモデルを生成するための手順は、PCのみで完全に自動化されています。
XVSからのデータは、UAVドローンまたは任意のカメラからのビデオと組み合わせて補完し、エリアを完全に再構築できます。
本システムは、高解像度画像、慣性システムおよび複合したアルゴリズムに基づいた技術が用いられています。XVSでシナリオを記録すると、写真測量技術によって3Dモデルが生成されます。歩きながら動きのあるシーンを記録すると、リアルタイムインターフェイスがデータ記録方法をガイドし、推奨の移動速度を提示します。そして必要に応じて計測エリアへ戻って十分に画像がオーバーラップするようにします。
Visual SLAM (Simultaneous localization and mapping) システムのおかげで、リアルタイムにタブレット上に軌跡が表示されます。慣性計測装置(IMU)センサーは、アルゴリズムが連続した画像ブロックを生成するのに役立ちます。
オフィスに戻り3Dモデルを生成するための手順は、PCのみで完全に自動化されています。
XVSからのデータは、UAVドローンまたは任意のカメラからのビデオと組み合わせて補完し、エリアを完全に再構築できます。
