

カーボンニュートラルや温室効果ガスの排出低減が一般化する以前の1999年から、ハンドガイドローラに鉛電池と電動モータを搭載して研究開発に取り組み始め、内燃機関とのハイブリッドなど、様々な方式を模索してきました。CSPI-EXPO2023では、昨年紹介したフル電動方式の研究1号機(電池で動く4トン振動ローラ)を改良した研究2号機と、内燃機関を電気モータに置き換える電動油圧方式の2技術を紹介します。
フル電動方式は、車両を構成する部品が少なく、内燃機関と油機に関わるフィルター類などが省略されるため、メンテナンス性が向上することや、電池搭載スペースが確保し易いため、稼働時間の向上が図れることなどが挙げられます。一方、電動油圧方式は、内燃機関との変更点が少なく、市場投入時期を短縮化できることが挙げられます。
2023年は、実施工現場での試用によって電動ローラのブラッシュアップを図ると共に、2030年のCO2排出量半減を経て、2050年までにはCO2排出量ゼロを達成できる製品を全機種で取り揃える予定です。
また、CO2排出量ゼロは到達点ではありません。電動化で磨いた制御技術を用いて、効率的な締固め技術やセンシング技術を開発し、ロードローラの本質である締固め品質の向上や、施工の効率化に努めていきます。特に、道路舗装面の高品質化は、完成した道路を走行する全車両の燃費向上や安全につながるため、当社の製品や施工現場のみならず、社会全体のカーボンニュートラルに直結すると考えています。

カーボンニュートラル(以下、CN)や温室効果ガスの排出低減が一般化する以前の1999年から、ハンドガイドローラに鉛電池と電動モータを搭載して研究開発に取り組み始め、内燃機関とのハイブリッドなど、様々な方式を模索してきました。CSPI-EXPO2023では、昨年紹介したフル電動方式の研究1号機(電池で動く4トン振動ローラ)を改良した研究2号機と、内燃機関を電気モータに置き換える電動油圧方式の2技術を紹介します。
フル電動方式の特徴には、車両を構成する部品が少なく、内燃機関と油機に関わるフィルター類などが省略されるため、メンテナンス性が向上することや、電池搭載スペースが確保し易いため、稼働時間の向上が図れることなどが挙げられます。一方、電動油圧方式の特徴には、内燃機関との変更点が少なく、市場投入時期を短縮化できることが挙げられます。
2023年は、実施工現場での試用によって電動ローラのブラッシュアップを図ると共に、2030年のCO2排出量半減を経て、2050年までにはCO2排出量ゼロを達成できる製品を全製品で取り揃える予定です。
また、CO2排出量ゼロは到達点ではありません。電動化で磨いた制御技術を用いて、効率的な締固め技術やセンシング技術を開発し、ロードローラの本質である締固め品質の向上や、施工の効率化に努めていきます。特に、道路舗装面の高品質化は、完成した道路を走行する全車両の燃費向上や安全につながるため、当社の製品や施工現場のみならず、社会全体のCNに直結すると考えています。

GNSSから得られる位置情報と、ロードカッタER555FのACCSⅣ(Automatic Cutter Control System Ⅳ)から得られる切削深さによる施工履歴を残すことが可能な、クラウドネットワーク型の出来形システムです。起工測量の結果から施工範囲と計画深さを作成し、専用WEBサイトにアップロードすることで、路面切削作業中に計画深さと実際の切削深さを専用ディスプレイに表示することができ、簡便な操作で施工履歴を記録することができます。記録した施工履歴はクラウドサーバに一定時間毎にアップロードされるため、専用WEBサイトでの簡易帳票と、点群処理ソフトウェアを用いた3次元表示などに必要なデータ出力が可能となっています。
[機能]
・現位置における計画深さと実際の切削深さの表示、記録および簡易帳票作成
・点群データの出力
[適用]
・国土交通省「3次元計測技術を用いた出来形管理要領(第4編 路面切削工編)」に準拠
・ICT建設機械等の認定(ICT建設機械およびICT装置群)
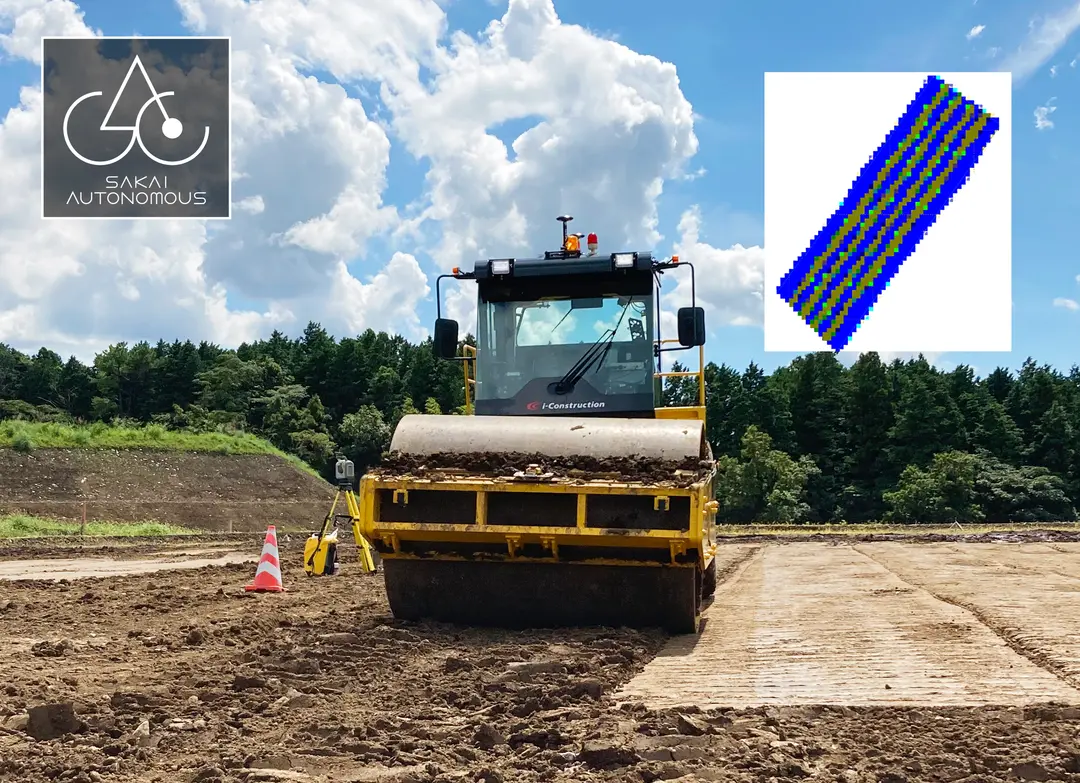
締固め品質と生産性向上を目的としており、自律・協調制御ならびに自動操縦等の機能を備えた業界標準機を目指しています。2019年に共同開発プロジェクトを発足して以来、様々な企業と実証実験を進めており、目標経路に対するズレは最大で20cm程度、規定回数で転圧された作業面積は有人作業比で3.5倍、さらに有人作業より少ないレーン数で転圧が完了するなどの結果が得られています。均一な締固め品質はもちろん、自律走行による省人化と高い走行精度による効率化で、生産性の向上だけでなくCO2排出量低減が見込まれる技術です。
転圧管理システムCompaction Meisterと緊急ブレーキ装置Guardmanも備えており、締固め管理が可能であると同時に安全性にも配慮されています。また、施工現場においては、車両を移動させたい、工事用道路や設計変更部分を施工したいなどの応急的な対応も必要になると考えます。そのため、有人、遠隔および自律走行のいずれでも簡便に切り替えて施工が可能な、実用性を考慮したシステムとなっています。

